 2015, Vol. 36
2015, Vol. 36



精准平整的土地可以提高农田灌溉效率和灌水均匀度, 提高肥料的利用率和有效抑制杂草的生长[1].在水田的常规平整中采用的简易平地设备一般由拖拉机后拖1根木棒或木板作为机具, 平地精度主要取决于机具的质量及泥面的软硬程度.常规平地受人工操作精度低和机具自身的缺陷等不利因素的影响, 难以满足地面精准灌溉的要求.激光平地技术采用激光发射器提供水平参考平面, 激光接收器检测激光平面, 通过控制系统控制液压平地铲的升降, 能够大幅度地提高田间土地平整精度[2].与田面粗平地状况相比, 激光控制精准平地条件下的灌溉效率可提高34%, 灌水均匀度可提高28% [1].
常规平地方式具有应用范围广、技术人员要求低、成本低等优势, 是目前我国农田平地的主要方式, 但在灌溉和产量方面, 其难以达到节水增产的目的.激光平地方式的精度高、成本相对较低、效率较高、节水增产, 在我国已经逐步推广, 但目前应用范围还比较小.旱地激光平地机技术已在国内推广应用[3-5], 水田激光平地技术也正在逐步推广[6-11].但是, 激光平地技术易受外界因素影响, 在强光、大风条件下工作会使平地精度产生较大误差[12], 同时, 由于激光接收器的垂直接收范围有限, 在大面积坡面平整时, 会出现激光信号丢失的现象[13].GPS(Global positioning system)控制平地技术通过高精度全球定位系统获取测量点的位置信息, 根据高程信息的变化控制平地铲进行作业.系统主要包括高精度全球定位系统、平地控制系统、液压系统和平地铲等[13]. GPS技术目前主要用于进行高程测量和监测, 我国在旱地平地方面有了初步探索[13-14], 但在水田平地技术方面还是空白.GPS技术可快速、准确地获得田间任意位置的三维坐标, 且不受外界环境的影响, 但是由于其成本高, 在我国还没有得到很好的研究与应用.随着我国北斗卫星系统的逐步完善, 定位精度将逐步提高, 为基于卫星定位的平地技术在农业领域中的应用提供了条件.
本文采用高精度全球定位系统(GPS), 设计了基于GPS技术的水田平地机, 对GPS定位数据使用了限幅平均滤波算法和PD控制算法, 并进行了相关试验测试.
1 平地机结构与工作原理 1.1 GPS水田平地机整机结构GPS水田平地机整机结构如图 1所示, 挂接平台的挂接点实现与拖拉机的三点悬挂连接, 平行连杆连接挂接架和平地铲总成.利用高程油缸和平行连杆机构实现平地铲总成上升和下降调节.平地铲总成由平地铲转动机构、转动轴台、水平油缸、天线安装杆、平地铲和拖板等主要部件组成.天线安装杆固定在平地铲转动轴台上, 保证GPS天线与平地铲总成同步运动.在平地作业过程中, 若GPS的高程定位检测到平地铲高于或低于设定的平地深度, 则通过高程油缸的缩短或伸长控制平地铲上升或下降, 以保持平地铲处于设定的深度, 实现将水田高处泥土搬运至低洼处, 达到水田平整的目的.

|
图 1 基于GPS技术的水田平地机结构 Figure 1 Structure of paddy field leveler based on GPS technology 1:挂接架,2:挂接点,3:增速箱,4:齿轮油泵,5:平行连杆,6:平地铲,7:拖板,8:水平控制器,9:平地铲转动机构,10:转动轴台,11:水平油缸,12:高程油缸,13:天线安装杆,14:GPS天线,15:油箱,16:机罩,17:液压阀,18:折叠油缸. |
平地铲、拖板和平地铲转动机构固定为一体, 利用水平油缸驱动平地铲绕转动轴转动, 实现平地铲倾斜角度调节.在平地作业过程中, 由于水田硬底深浅不一, 拖拉机和平地铲产生倾斜, 此时水平控制器通过调节水平油缸使平地铲保持水平[7-8, 15].高程油缸和水平油缸的运动由平地机液压系统的三位四通电磁换向阀(型号DSG-01-3C60-D12-N1-50)控制驱动[16].
1.2 平地机工作原理与构成基于GPS技术的水田平地机原理和构成如图 2所示.水田平地机与拖拉机的三点悬挂机构连接, 通过液压油缸实现平地铲上升和下降调节.GPS接收天线安装于平地铲上, 与平地铲同步运动.考虑拖拉机对GPS卫星信息的遮挡, GPS接收天线安装高度超过拖拉机高度.GPS的垂直定位数据反映了GPS接收天线所处的海拔高度(相对参与海平面), 也即反映了平地铲的绝对海拔高度.在平地作业过程中, 根据设定的平地铲平地作业深度, 当平地铲高于或低于设定的深度时, 则通过液压油缸的缩短或伸长控制平地铲上升或下降, 以保持平地铲处于设定的深度, 实现水田精准平整.

|
图 2 基于GPS技术的水田平地机原理与构成 Figure 2 Principle and structure of paddy field leveller based on GPS |
试验中采用的RTK-DGPS系统包括Trimble接收机2台(型号:5700)、Zephyr圆盘天线2台、差分电台天线1套(型号:Trimmark3).Trimble 5700测量精度为:动态测量时, 水平方向为± (10 + 0.001) mm(RMS), 垂直方向(高程)为± (20 + 0.002) mm (RMS); 静态条件下, 水平方向为± (5 + 0.000 5) mm(RMS), 垂直方向(高程)为± (5 + 0.001) mm (RMS).试验中, GPS接收机以10 Hz的频率输出GPS的定位数据.
2.2 田间试验方法GPS平地机田间试验在华南农业大学岑村教学科研基地进行, 试验田块的长和宽分别为90和60 m, 以2.5 m的间距选取采样测量点.以适宜的高度架设激光发射器并通过自动调平功能发射出水平激光扫描平面, 利用激光发射器的激光面作为高度基准面, 手持激光接收器在田块各采样测量点上方确定激光面的高度位置, 激光发射器采用Trimble AG401和其配套的手持激光接收器[17], 测量时保持手持激光接收器上的水平仪气泡稳定在水平位置, 再用米尺(精度1 mm)测量并记录平整前泥面和激光平面的垂直高度数据.测量完成后用GPS水田平地机进行平整作业.平整作业完成后用相同方法测量平整后田泥的高度数据.
2.3 GPS的高程动态定位为观测GPS高程动态定位性能和限幅加权递推平均滤波算法的效果, 将GPS天线安装在拉杆位移传感器的拉杆端, 拉杆位移传感器底部垂直固定在三角架上, GPS天线可以在位移传感器量程内垂直上下运动, 如图 3所示.数据处理器同时采集和处理GPS和位移传感器的数据, 然后通过串口将处理后的数据传送给计算机保存.其中, GPS采集频率为10 Hz, 位移传感器的采集频率为100 Hz.拉杆电子尺为美国TTC-TOM位移传感器, 量程250 mm, 线性精度误差<0.05%, 重复性误差<0.005 mm, 最大位移速度10 m·s-1.

|
图 3 GPS的高程动态定位测试 Figure 3 Test of GPS height dynamic positioning |
平地铲运动控制算法的参数通过试验确定, 使平地铲运动平稳.上升控制时比例系数为12、微分时间常数为0.5 s, 下降控制时比例系数为8、微分时间常数为0.3 s, 死区宽度5 mm, 回差宽度2 mm.控制信号输出为PWM形式, 若占空比低于65%难以开启电磁阀, 因此控制信号输出占空比低于65%时, 控制系统限定最小输出占空比65%, 最大输出占空比100%.
2.4.1 限幅平均滤波算法RTK-DGPS动态测量时水平精度为± (10 + 0.001)mm, 垂直精度为± (20 +0.001)mm.垂直精度可以满足精确土地平整要求, 但是在作业中, 垂直定位数据波动较大, 为获得稳定平滑的定位数据, 设计了限幅加权递推平均滤波算法.
在农田正常作业中, 由于泥脚的高低不平, 平地铲相对泥面上下运动.设平地机上下运动的最大速度为vmax (单位为m·s-1), GPS高程定位数据输出频率为10 Hz, 则GPS输出的每2个相邻高程定位数据之间的绝对差值不能超过hmax = 0.1t vmax, 限幅表达式如下式所示:
|
式中, hmax为限幅值, Pk为k时刻GPS高程定位值, Pk-1为k - 1时刻GPS高程定位值.
加权递推平均滤波是将不同时刻的数据加以不同的权, 再进行递推平均滤波.连续N个GPS高程定位数据的加权递推平均滤波表达式如下, 对越接近参考基准值的数据, 权重越小, 以平滑GPS在参考基准面处的漂移.

|
式中, N为用于滤波的GPS高程定位数据的个数; a为权值, a1 + a2 + … + aN = 1.
2.4.2 平地铲运动控制算法为了精确和稳定地控制平地铲高程运动, 采用了PD控制方法.在GPS平地控制系统中, 平地铲高程为高度距离(根据田面情况设定); 差值(实际测量值减去平整作业设定的基准值)为e(t), 则

|
式中, Kp为比例系数; τ为微分时间常数.
通过PD控制算法计算出驱动电磁阀的占空比, 并设置了双阈值死区, 利用二者之间存在的施密特回差提高控制系统的稳定性[18-19].
3 结果与分析 3.1 GPS的高程动态定位试验GPS的高程动态定位试验结果如图 4所示, 从图中可以看出, GPS的高程定位精度和动态跟踪能力较好, 能满足平地机高程测量要求.在GPS平地机工作中, 平地铲高程调节运动到最高处和最低处时, GPS高程测量误差较大, 如图 4a所示; 经过限幅加权递推平均滤波算法处理后减小了测量误差, 如图 4b所示.

|
图 4 GPS高程动态定位试验结果 Figure 4 Results and statistics of GPS height dynamic positioning |
水田田面的平整精度采用农田表面相对高程的标准偏差值和选取的所有采样测量点的高程与期望的相对高程的绝对差值来评价[5].标准偏差反映水田表面平整度的总体状况, 标准偏差越小说明平整越好; 不大于5 cm的测量点累积百分比数评价田间地面形状的差异及其分布的特征, GPS平地试验结果如表 1所示.
|
|
表 1 田间平整试验结果统计 Table 1 Results of paddy field leveling test |
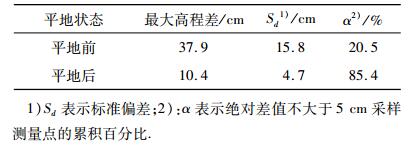
田间平地作业过程中, GPS水田平地机可以稳定工作.田面最大高程差从平地前的37.9 cm降低到10.4 cm, 相对高度的标准偏差值Sd从平地前的15.8 cm下降到平地后的4.7 cm, 平地后绝对差值| hi - h |≤5 cm采样测量点累计百分比达85.4%, 表明经GPS水田平地机平整作业后可以有效地改善水田的田面平整情况.
4 结论设计了基于GPS技术的水田平地机, 对RTK-GPS高程数据采用了限幅加权递推平均滤波算法, 采用PD控制算法控制平地铲运动, 实现了利用GPS控制水田平地机.
研究了GPS高程数据的动态精度和GPS高程数据处理算法, 利用限幅加权递推平均滤波减少了GPS高程定位数据误差; 经GPS控制平地机平整后的田块田面相对高程的标准偏差值由15.8 cm减小到4.7 cm, 平整后的绝对差值在5 cm以内的采样测量点累积百分比数达85.4%, 能有较改善田面平整状况.
随着我国北斗卫星系统的逐步完善, 定位精度将逐步提高, 将为基于卫星定位的平地技术在农业领域中的应用提供条件.今后还需进一步研究如何提高GPS平地机的平整精度.
| [1] |
李益农, 许迪, 李福祥. 田面平整精度对畦灌性能和作物产量影响的试验研究[J]. 水利学报, 2000(12): 82-87. DOI:10.3321/j.issn:0559-9350.2000.12.016 (  0) 0) |
| [2] |
WALKER W R. Guidelines for designing and evaluating surface irrigation systems[M]//Anon. Guidelines for designing AND evaluating surface irrigation systems. Rome: Food and Agriculture Organization of the United Nations. 1989: 148.
( 0) |
| [3] |
许迪, 李益农, 刘刚. 激光控制农田土地精细平整应用技术体系研究进展[J]. 农业工程学报, 2007, 23(3): 267-272. DOI:10.3321/j.issn:1002-6819.2007.03.052 ( 0) |
| [4] |
侯明亮, 毛恩荣, 刘刚. 激光控制平地系统控制技术的研究与试验[J]. 农业工程学报, 2006, 22(1): 110-113. DOI:10.3321/j.issn:1002-6819.2006.01.024 ( 0) |
| [5] |
刘刚, 林建涵, 司永胜, 等. 激光控制平地系统设计与试验分析[J]. 农业机械学报, 2006, 37(1): 71-74. DOI:10.3969/j.issn.1000-1298.2006.01.019 ( 0) |
| [6] |
LUO Xiwen, ZHAO Zuoxi, LI Qing. Study on leveling control for a paddy laser leveler[C]//American Society of Agricultural Engineers. 2007 ASAE Annum Meeting Presentation paper. New York: ASME, 2007.
( 0) |
| [7] |
李庆, 罗锡文, 汪懋华, 等. 采用倾角传感器的水田激光平地机设计[J]. 农业工程学报, 2007, 23(4): 88-93. DOI:10.3321/j.issn:1002-6819.2007.04.017 ( 0) |
| [8] |
赵祚喜, 罗锡文, 李庆, 等. 基于MEMS惯性传感器融合的水田激光平地机水平控制系统[J]. 农业工程学报, 2008, 24(6): 119-124. DOI:10.3321/j.issn:1002-6819.2008.06.023 ( 0) |
| [9] |
胡炼, 罗锡文, 赵祚喜, 等. 超声波传感器评定水田激光平地机水平控制系统性能[J]. 农业机械学报, 2009, 40(增刊): 73-76. ( 0) |
| [10] |
胡忠飞, 王玉家, 刘庆君. 水田激光控制平地技术大有可为[J]. 农业机械化与电气化, 2001(3): 31. DOI:10.3969/j.issn.1674-1161.2001.03.033 ( 0) |
| [11] |
胡炼, 罗锡文, 林潮兴, 等. 1PJ-4.0型水田激光平地机设计与试验[J]. 农业机械学报, 2014, 45(4): 127-132. ( 0) |
| [12] |
李鑫磊. 基于GPS控制的平地系统的研究与开发[D]. 北京: 中国农业大学, 2011.
( 0) |
| [13] |
王泷, 刘刚, 刘寅, 等. 基于GPS的农田坡面平整技术与试验[J]. 排灌机械工程学报, 2013, 31(5): 456-460. DOI:10.3969/j.issn.1674-8530.2013.05.016 ( 0) |
| [14] |
刘寅, 刘刚, 杨飞, 等. 基于GPS控制技术的土地平整系统[C] //中国农业工程学会. 中国农业工程学会2011年学术年会论文集. 北京: 中国农业工程学会, 2011.
( 0) |
| [15] |
胡炼, 罗锡文, 赵祚喜, 等. 基于ADIS16300和LPR530的水田激光平地机水平控制系统[C]//中国农业工程学会. 中国农业工程学会2011年学术年会论文集. 北京: 中国农业工程学会, 2011.
( 0) |
| [16] |
冯红宝, 王庆, 万德钧. GPS车载导航中的坐标转换[J]. 中国惯性技术学报, 2002, 10(6): 29-34. DOI:10.3969/j.issn.1005-6734.2002.06.006 ( 0) |
| [17] |
Trimble Inc. AG401 user guide[EB/OL]. (2013-11-20)[2014-11-21]. http://www.trimble.com.
( 0) |
| [18] |
康华光. 电子技术基础:数字部分[M]. 4版. 北京: 高等教育出版社, 2000.
( 0) |
| [19] |
胡炼, 罗锡文, 赵祚喜, 等. 插秧机电控操作机构和控制算法设计[J]. 农业工程学报, 2009, 25(4): 118-122. ( 0) |