 2015, Vol. 36
2015, Vol. 36



2. 江苏省现代设施农业技术与装备工程实验室,江苏 南京 210031
2. Jiangsu Province Engineering Laboratory for Modern Facilities Agricultural Technology and Equipment, Nanjing 210031, China
精确农业为农业可持续发展提供了技术基础[1-3],变量作业特别是变量施肥作业是实施精确农业的一个重要环节,它将3S (GPS、GIS、RS)技术与农学、土壤学等基础学科有机地结合起来,有效地控制作物循环中养分的交换,减小农作物品质的改变及农药对环境的破坏,大大提高了肥料的利用率、降低生产成本、增加农民收入[4-6].
在实现精确农业的变量施肥技术方面有很多研究[7-9],而对精准追肥机械的执行机构鲜见介绍.执行机构作为变量施肥机的核心,其结构设计的合理与否直接影响到追肥作业精度,现有的变量施肥机的执行机构种类比较多,主要有电控机械无级变速器型:技术水平相对较低,机械结构相对简单,工作比较可靠,成本比较低,便于国产播种机进行改装,适合于中型变量施肥播种机[10-11];电控液压马达型:技术水平相对比较高,为机械-电子-液压相结合,变量控制结构相对复杂,成本比较高,适合大型变量施肥播种机和施肥机[12-16];电机直接驱动型:技术水平相对适中,变量施肥机构相对简单,成本低于电控液压马达式,适用中小型变量施肥播种机和施肥机[17-20].本文所设计的新型轴分段式双调节变量追肥机?用步进电机直接驱动型,结构简单,成本低,在扭矩允许的情况下,不会因为扭矩的变化而失灵,而且有利于田间作业环境.本研究设计了一种新型轴分段式双调节精准追肥机械,详细地说明了其执行机构的工作过程和机械结构.新设计的变量施肥机的执行机构综合考虑了作物追肥的特点以及追肥机械的实用性,操作简单,改善了传统施肥机械操作复杂、稳定性差、时效性差的不足,实现自动化实时追肥,适合稻麦作物的精准追肥作业.
1 新型变量追肥机结构及工作原理 1.1 施肥机的总体结构与主要技术参数本文所设计的新型轴分段式双调节变量施肥机,改用电机代替传统的变量施肥机通过地轮带动排肥轴转动,且使用分段排肥轴,提高追肥可控精度,减小传统单根排肥轴的负载扭矩.其主要结构如图 1所示,为传统的3点悬挂式,工作幅宽2 m,左、右2个独立工作组各负责1 m的作业区;其带动外槽轮式排肥器转动的输入轴通过联轴器与无刷直流行星减速电机直接相连,进电机连接的丝杆滑轨的滑片通过杠杆与输入轴相连;追肥机控制器接收高光谱传感器的信息,结合施肥专家系统,实时地产生施肥量,再结合机具的行进速度,转化为外槽轮式排肥器的转速和开度配比.

|
图 1 变量施肥机三维结构图 Figure 1 The three-dimensional structure diagram of variable rate fertilizer machinery 1:支架;2:排肥软管;3:联轴器;4:主轴;5:步进电机;6:滑块;7:显示屏;8:电控箱;9:蓄电池;10:丝杠;11:肥料箱;12:杠杆;13:挡板;14:悬架;15:槽轮;16:减速电机. |
结合上述结构简图可以看出,追肥机作业数为8行,排肥器分为左右2组,每组4个,分别固定在相应的分段输入主轴上,主轴的一端由联轴器连接在直流无刷行星减速电机的输出轴上,直流电机额定功率为100 W,减速比为1: 36,减速后的额定转速为100 r·min-1,扭力为12 N·m.步进电机连接的丝杆滑块在丝杆导轨上通过联轴器套接在排肥输入主轴上,由步进电机转动来控制丝杆滑块移动,通过杠杆装置带动槽轮移动,以达到控制槽轮式排肥器有效工作长度的目的.步进电机额定扭矩为29.4 N·m,最大瞬间允许负载为44 N·m.而丝杆滑块轴向移动的长度界限通过丝杆上的限位开关控制,整个机组的工作动力由蓄电池组提供.本追肥机为拖拉机3点后悬挂,圆盘开沟器,其主要技术参数:长×宽×高为2 150 mm × 912 mm × 1 250 mm;配套动力为江苏- 754拖拉机(>10 KW);整机质量为450 kg;工作行距为220 mm,行数为8 mm;作业幅宽为2 000 mm;施肥方式为外槽轮式;肥箱容积为200 L;作业速度为3 ~ 7 km·h-1;施肥量为0 ~ 225 kg·hm-2;生产效率为0.3 ~ 0.6 hm2·h-1.
1.2 施肥机执行机构的工作原理新设计的轴分段式变量施肥机执行机构的主要工作过程如下:外槽轮式排肥器有效工作长度的调控机构是由步进电机、丝杆滑轨、杠杆以及联轴器构成,分为左、右2个独立输入轴带动,步进电机控制丝杆带动杠杆转动,杠杆带动输入轴左、右移动,而槽轮固定在输入轴上随着输入轴左右运动.设备里面用的是左、右2个丝杆滑轨,而位移传感器主要就是用来测量丝杆滑轨上滑片的位置,通过知道滑片的位置反推排肥的实际长度.在丝杆滑轨的两端设有相应的限位开关,为的是防止滑片移动到左右两端时,步进电机还继续工作.变量施肥作业时,控制器发送控制信号,驱动步进电机动作,步进电机旋转带动丝杆滑轨移动,从而带动排肥器改变有效作业长度.
直流无刷行星减速电机与排肥输入轴的套接使直流电机的中心轴通过联轴器直接与排肥输入轴相连接,电机外面套装不锈钢保护装置.变量施肥作业时,控制器反馈PWM调速信号,调节电机转动速率,从而改变排肥器的排肥量.
2 施肥机执行机构主要部件设计新型轴分段式变量施肥机执行机构的设计主要包含输入轴的周向转动(调速机构)和轴向移动(换向机构)2个控制结构.通过调节输入轴的周向转速的快慢,控制槽轮转动1周的施肥量;通过调节输入轴轴向移动,控制槽轮排肥槽长度的施肥量.从而可实现本文所设计的新型轴分段式变量施肥机转速和开度的实时双调节.
2.1 施肥机执行机构的换向结构设计新设计的换向机构区别于传统的手动或半自动控制,本换向结构的设计主要是通过螺杆、螺母配合的螺旋运动,将步进电机的旋转运动转化为直线移动,再通过杠杆结构,把螺母的直线移动转化为槽轮的轴向移动.换向结构的机构简图如图 2所示.

|
图 2 执行机构换向结构图 Figure 2 The structure diagram of actuator's commutor 1:固定架;2:步进电机;3:主轴滑块;4:支点;5:螺杆(丝杠);6:螺母(丝杆滑块);7:杠杆. |
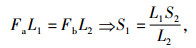
对换向机构进行简单的受力分析:对于杠杆结构,当杠杆上只受2个力,且处于平衡状态时,杠杆的平衡条件用公式表示为:F1L1 = F2L2.受力分析如图 3所示,图中O为支点,根据杠杆平衡条件可得公式:
|

|
图 3 杠杆受力分析图 Figure 3 The diagram of force analysis of leverage |
式中,Fb为螺母所受到螺杆从动力,在此杠杆结构中为主动力,S1、S2分别为主轴滑块和螺母移动的直线长度,Fa为主轴滑块所受到杠杆的从动力(阻力),L1、L2为力臂.
在杠杆机构中,根据杠杆的平衡条件公式,选择合适的支点的位置,结合施肥机其他工作部件的结构尺寸,设计此杠杆D1 = 150 mm、D2 = 350 mm为省力杠杆(从动力臂L1<主动力臂L2),以减小步进电机的驱动负载,改善后续工作条件,而且主轴滑块的移动长度可以通过螺母的移动长度来计算,从而间接计算槽轮的轴向有效长度.
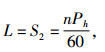
2.1.2 执行机构的螺旋结构分析对于普通螺旋传动机构,是利用螺杆和螺母组成的螺旋副来实现传动要求,将回转运动转化为直线运动.本文所设计的新型轴分段式变量施肥机执行机构采用的螺旋传动如图 4所示,螺母轴向直线移动的距离L(mm)可用公式求得:
|

|
图 4 螺旋传动结构图 Figure 4 The structure diagram of screw drive 1:步进电机;2:电机轴;3:螺杆(丝杠);4:螺母(丝杠滑块). |
式中,n为步进电机转速(r·min-1),Ph为单线右旋普通螺纹导程(mm).
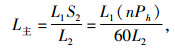
根据变量施肥机原有槽轮的长度(70 mm),以及上述设计的杠杆尺寸参数,设计出螺旋丝杠有效长度应大于163.3 mm,才能保证槽轮的正常工作调节.选取单线右旋普通螺纹导程为20 mm.对于整个换向结构,是通过螺旋机构和杠杆机构的相互配合来完成的,综合以上2个机构的运动分析,求得主轴滑块的轴向移动距离为:
|
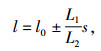
所以通过简化变换有槽轮有效作业开度为:
|
式中,l为有效作业开度(mm),l0为外槽轮式排肥器初始工作开度(mm),L1为支点到传动轴的垂直距离(mm),L2为支点到丝杆螺母的垂直距离(mm),s为传动螺母的相对位移(mm),±表示移动方向前进或后退.
综上所述,通过步进电机的转速控制,可以精确的计算槽轮有效工作长度数值的大小,从而实时准确控制施肥机的追肥量,实现相对意义上的精准追肥.
2.2 施肥机执行机构的调速结构设计调速机构在本设计中与传统的调速方式大致相同,为电机直接驱动式,其连接结构简图见图 5,利用步进电机通过传动机构驱动排肥器,从而控制排肥量的大小.

|
图 5 调速机构结构图 Figure 5 The structure diagram of governor mechanism 1:电机;2:侧板;3:连接装置;4:排肥主轴. |
如果不考虑由于排肥轴转速变化而引起的排肥量的非线性跳动,那么单个排肥器的排肥量与排肥轴转速(即电机转速)存在如下关系:

|
式中,q为单个排肥槽轮的排肥量(g·min-1),n为排肥主轴转速(r·min-1),k为标定拟合直线的斜率,b为标定拟合直线的截距(mm).
需要说明的是,不同的排肥器,排肥轴转速与排肥量之间都有不同的对应关系.所以,在变量施肥技术的研究过程中,必须对所选的施肥器进行标定试验,具体情况具体分析.
3 材料与方法 3.1 材料本试验机具由南京农业大学研制,江苏洁澜现代农业装备有限公司生产制造,配套江苏- 754轮式拖拉机作为牵引动力,于2014年4月在江苏省滨海县黄海农场进行田间生产试验.
播种小麦,品种为淮麦19,以目前普遍使用的颗粒状尿素为研究对象,其容重为0.746 g·cm-3,颗粒度范围d为0.85 ~ 2.80 mm.
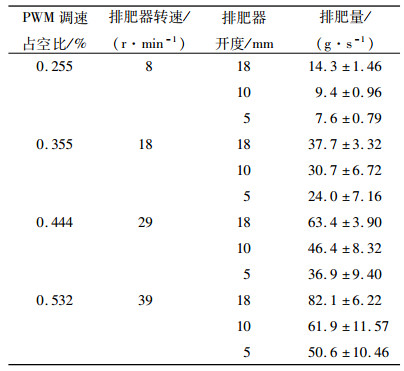
3.2 追肥机执行机构实验室性能测定为实现精准追肥的目标,保证在大田试验时能通过GreenSeeker高光谱传感器获取作物冠层的光谱信息,以及能通过调节施肥机转速和排肥槽轮轴向开度获得需要的排肥量,所以在追肥机静止时对排肥器不同转速和开度下的排量进行了测定.试验通过触摸屏调节排肥器转速分别为8、18、29和39 r·min-1,开度分别为5、10、18 mm.试验时,排肥导管口套有称质量袋,系统内部自动定时60 s,每个速度和开度重复3次试验,排量通过称取肥料质量得到.
3.3 追肥机执行机构田间试验根据小麦种植拔节期广泛追施氮肥的特点,在小麦种植初期,对小麦进行分区域施用4组不同的底肥,分别为正常施肥量的0(不施肥)、33.3%、66.7%和100%.在小麦生长拔节期对该试验田分区域进行追肥试验,通过称量追肥前后肥箱内的肥料差值,得到各区域的实际施肥量,进行追肥对比试验.
4 结果与分析本新型轴分段式变量追肥机标定试验检测结果如表 1所示,不同转速不同开度下,排肥器排量测定数据并统计分析.结果表明在转速一定的情况下,随着开度的增大,排量逐渐增大;开度一定的情况下,随着转速的降低,槽轮每秒排量逐渐减小.选取表 1中转速为8、18 r·min-1,开度为10 mm的排肥量数值,根据前文所述公式,计算出对应的单个排肥槽排肥量方程,选定k、b值.可以看出肥料在不同转速不同开度下,由此公式计算的理论排肥量与实际排肥量的标准偏差较大,这与其较好的流动性有关,标准偏差值最大为11.57,最小值不到1,忽略此跳动无效值,整个执行机构的排肥控制精度达到90%以上,执行机构排肥效果稳定.
|
|
表 1 不同转速和开度排肥量测定 Table 1 Fertilizing amount measurement on different rotating speed and opening width |
本新型轴分段式变量追肥机大田试验检测结果如表 2所示,是基于作物冠层高光谱信息,实时生成的施肥配比.小麦长势存在空间差异性,并反映在归一化植被指数(NDVI)上[21].机械通过GreenSeeker高光谱传感器可以及时、准确地获取作物冠层的光谱信息,专家系统根据反馈的光谱信息、机具行进速度,决断外槽轮排肥器的转速以及外槽轮的开度,实时地调整施肥量.试验结果表明:追肥系统控制误差都小于10%,整体追肥系统控制精度高达90%以上,能够实现精确追肥的目的.
|
|
表 2 田间试验数据 Table 2 Field experience data |

本文提出了一种新型轴分段式双调节稻麦精准追肥机,其适合于目前国产施肥机的变量追肥执行机构双通道协调工作,综合考虑了作物追肥的特点以及追肥机械的实用性.试验表明,通过控制槽轮的转速和开度的实时双调节,可实现精量追肥.
排肥器转速由直流电机驱动,并由步进电机控制开度,采用闭环反馈PID控制方法,通过PWM技术调整占空比实现转速调节;通过定时子程序控制步进数实现开度调节.排肥器不同转速和开度下的排量测定数据表明肥料在不同转速不同开度下,执行机构排肥精度在90 %以上.
通过GreenSeeker高光谱传感器实时、准确地获取作物冠层的光谱信息,实现了作物冠层NDVI值采集与相应追肥量的计算、实时控制追肥机构速度和开度双重调控,精确地变量追肥,大田追肥决策系统控制精度达到90%以上,系统性能良好.
初步试验表明,该机型设计合理,主要技术指标满足农艺要求,能实现精确农业意义上的精准追肥作业,适合于目前国产施肥机.在后续试验过程中,槽轮转速、开度以及车速检测的准确性直接影响施肥的控制精度,在减小标准偏差和控制误差基础上进一步开展优化试验;变量追肥机的主要成本是光谱监测系统,其经济性和实用性难以控制,在以后的研究中应对此进行优化,为设计研制适合国产追肥机的变量追肥执行机构创造条件,为加快作物变量施肥机的改进设计提供参考.
| [1] |
汪懋华. "精细农业"发展与工程技术创新[J]. 农业工程学报, 1999, 15(1): 7-14. (  0) 0) |
| [2] |
彭望禄, PierreRobert, 程惠贤. 农业信息技术与精确农业的发展[J]. 农业工程学报, 2001, 17(2): 9-11. DOI:10.3321/j.issn:1002-6819.2001.02.003 ( 0) |
| [3] |
Blackmore BS. An information system for precision farming[J]. Comp Electron Agr, 2000, 26(1): 37-51. DOI:10.1016/S0168-1699(99)00075-7 ( 0) |
| [4] |
张睿. 智能型变量施肥关键技术研究[D]. 北京: 中国农业科学院, 2012. http://cdmd.cnki.com.cn/Article/CDMD-82101-1012406104.htm
( 0) |
| [5] |
李世成, 秦来寿. 精准农业变量施肥技术及其研究进展[J]. 世界农业, 2007(3): 57-59. DOI:10.3969/j.issn.1002-4433.2007.03.018 ( 0) |
| [6] |
张睿, 王秀, 赵春江, 等. 链条输送式变量施肥抛撒机的设计与试验[J]. 农业工程学报, 2012, 28(6): 20-25. DOI:10.3969/j.issn.1002-6819.2012.06.004 ( 0) |
| [7] |
赵雄, 陈建能, 杨茂祥, 等. 二阶自由非圆齿轮行星系钵苗移栽机取苗机构[J]. 农业机械学报, 2014, 45(4): 123-126. ( 0) |
| [8] |
SADLER E J, CAMP C R, EVANS D E, et al. Variablerate, digitally-controlled fluid metering device[J]. T ASABE, 2000, 16(1): 39-44. ( 0) |
| [9] |
MORRIS D K, ESS D R. Development of a site-specific application system for liquid animal manures[J]. T ASABE, 1999, 15(6): 633-638. ( 0) |
| [10] |
赵军, 于洁, 王熙, 等. 机械驱动式精密变量施肥播种机的研制[J]. 黑龙江八一农垦大学学报, 2006, 18(2): 49-52. DOI:10.3969/j.issn.1002-2090.2006.02.014 ( 0) |
| [11] |
梁春英, 衣淑娟, 王熙, 等. 变量施肥控制系统PID控制策略[J]. 农业机械学报, 2010, 41(7): 157-162. DOI:10.3969/j.issn.1000-1298.2010.07.033 ( 0) |
| [12] |
李爱传, 王熙, 李琳, 等. 电控液压马达驱动控制器的研究[J]. 黑龙江八一农垦大学学报, 2009, 21(1): 66-68. DOI:10.3969/j.issn.1002-2090.2009.01.019 ( 0) |
| [13] |
高自成, 李立君, 李昕, 等. 齿梳式油茶果采摘机采摘执行机构的研制与试验[J]. 农业工程学报, 2013, 29(10): 19-25. ( 0) |
| [14] |
LUKINA E V, FREEMAN K W, WYNN K J. Nitrogen fertilization optimization algorithm based on in-season estimates of yield and plant nitrogen uptake[J]. J Plant Nutr, 2001, 24(6): 885-898. DOI:10.1081/PLN-100103780 ( 0) |
| [15] |
WILLIAM J F. Overview of automotive sensors[J]. IEEE Sens J, 2001, 4(1): 296-308. ( 0) |
| [16] |
刘成良, 苑进, 刘建政, 等. 基于ARM和DSP的双变量施肥控制系统设计与试验[J]. 农业机械学报, 2010(S1): 233-238. ( 0) |
| [17] |
赵登峰. 棉花变量施肥关键技术及装置研究[D]. 石河子: 石河子大学, 2012. http://cdmd.cnki.com.cn/Article/CDMD-10759-1013131463.htm
( 0) |
| [18] |
马旭, 马成林, 桑国旗, 等. 变量施肥机具的设计[J]. 农业机械学报, 2005, 36(1): 50-53. DOI:10.3969/j.issn.1000-1298.2005.01.014 ( 0) |
| [19] |
王秀, 赵春江, 孟志军, 等. 精准变量施肥机的研制与试验[J]. 农业工程学报, 2004, 20(5): 114-117. DOI:10.3321/j.issn:1002-6819.2004.05.024 ( 0) |
| [20] |
潘世强, 曲桂宝, 孙振中, 等. 2BFJ - 6型变量施肥精密播种机的研制[J]. 中国农机化, 2009(6): 66-69. DOI:10.3969/j.issn.1006-7205.2009.06.19 ( 0) |
| [21] |
RAUN W R, SOILE J B, STONE M L, et al. Optical sensor-based algorithm for corp nitrogen fertilization[J]. Commun Soil Sci Plan, 2005, 36(19 /20): 2759-2781. ( 0) |