 2016, Vol. 37
2016, Vol. 37



2. 广东省农业航空应用工程技术中心/华南农业大学 工程学院,广东 广州 510642
2. Engineering Research Center for Agricultural Aviation Application of Guangdong Province/College of Engineering, South China Agricultural University, Guangzhou 510642, China
随着精细农业的发展,在农田数据采集中已经广泛采用了无线传感网[1-2]。但是在传统的静态WSN(Wireless sensor network)网络中,网关节点周围的传感器节点需要在转发数据上耗费大量的能量,而这些传感器节点过早地耗尽能量将造成网络内能耗不均衡,导致整个系统出现故障[3-4]。此外,数据包在网络中经过的跳数越多,其发生错误的概率也就越大。而在传统的WSN中引进移动采集节点所组成的MSWSN(Mobile sink WSN)则在多方面具有先天的优势,在MSWSN中,可以通过移动采集节点的运动来减少数据包从数据源节点发送到数据目的节点所经过的跳数,从而提高采集信息的质量,减少系统中数据包的重传,也减少系统的能量消耗。由于系统的能量消耗变得相对均匀,从而延长了整个系统的生存时间[5-7]。MSWSN所具有的另一个优势在于MSWSN系统更易于追踪目标信息。在WSN中,大部分的无线传感器节点都是被随机部署在目标区域内的,这种部署方式并不精确。因此部署的无线传感器节点并不一定处于监测目标的最好位置,而移动的信息采集节点可以更好地移动到适合于收集信息的位置,以提高监测目标的准确性。而在较为稀疏的网络中或者通信断开的网络中,移动的信息采集节点还可以通过自己的移动性来提高系统的通信效率。将移动采集节点应用到WSN中还可以提高所采集信息的保真度。同时,包含移动采集节点的WSN系统的容量增益比传统的WSN网络多3~5倍,提高了整个WSN系统的信息收集效率[7-9]。
UAV(Unmanned aerial vehicle)是作为移动节点很好的选择。这主要是由于如下2个原因:一方面UAV具有相当好的灵活性和有用性,可以执行多种类型的信息采集任务,并且UAV可以重复多次地执行其飞行路径,以收集更多需要的信息;另外,UAV还可以抵达偏远地区或严酷的环境,这也扩大了信息收集的范围[10-14]。本研究将UAV引入传统的WSN中,将UAV-WSN结合起来应用于农田信息监测,从而有效地扩展单个WSN的覆盖面积,以解决无线传感器节点受风吹雨打、动物破坏、植物屏蔽等恶劣的自然环境影响而导致农田监测信息采集失败的问题。
1 UAV-WSN系统的结构和设计 1.1 UAV-WSN农田数据采集系统的结构UAV-WSN农田数据采集系统对位于农田信息采集区域内监测目标的信息进行感知、收集和处理,并把这些得到的农田信息发送给监测数据中心。该系统由4个部分组成(图 1):UAV、无线传感器节点、感知对象和监测数据中心,这4个部分之间通过无线网络进行相互通信,最常见的方式是通过ad-hoc网络,无线传感器节点可以是信息的发送和接收单元,也可以充当网络中的中继单元。无线传感器节点由电源、嵌入式处理器、存储、通信部件和软件等部分组成。监测数据中心包括收集到的感知信息的接收存储和数据处理部分。监测数据中心的数据可以被用户、计算机或其他设备访问。用户可以主动查询或收集传感器网络的感知信息或被动地接受传感器网络所发布的感知信息。用户对监测数据中心收集到的感知信息进行分析和数据挖掘,并根据分析的结果做出决策或采取相应的行动。感知对象是用户所感兴趣的目标和执行监测任务的WSN的感知物体,感知对象的主要内容包括物理现象、化学现象和其他数字信号。

|
图 1 UAV-WSN农田数据采集基本结构 Figure 1 The basic structure for UAV-WSN farmland data collection |
WSN是由无线传感器节点、信息处理单元和无线通信模块组成的一个自组织网络系统。其执行的任务包括采集环境中感兴趣的各种目标信息,目标信息被采集到该信息的无线传感器节点,通过单跳或多跳的方式发送至目的节点或特定的接收者;当数据通过中继节点进行传递时,通常需要通过某种方式进行消除冗余和提取信息的步骤。UAV可以是固定翼或者是单/多旋翼无人驾驶飞机,在UAV上安装可以与地面传感网通信的节点,并通过GPRS或者3G模块与数据中心通信,将地面传感网感知和收集到的数据传输到数据中心。数据中心对UAV进行控制并与其进行通信,UAV从某一点进入目标信息采集区域并按预定的路径执行信息采集任务。UAV向通信距离内的传感器节点发送信标信号(Beacon signal),无线传感器向UAV返回其采集到的农田环境信息,UAV将信号传送回数据中心[11-12]。
1.2 UAV-WSN农田数据采集系统的设计 1.2.1 WSN的设计无线传感网主要是由部署在目标信息区域内的无线传感器节点之间的网络组成,网络中的无线传感器节点在目标信息区域内感知并收集环境信息。传统的农田监测WSN网络由于监测目标覆盖面广,往往需要布设大量的无线传感器节点,并保证节点之间的通信链路正常。这种大规模的WSN数据的传输需要多跳传递才能将所需的数据从数据源节点发送至信息采集节点,这也导致信息采集节点周围承担大量数据转发任务的节点因过早地耗尽能量而退出网络。由于风吹雨打、动物破坏、植物屏蔽等原因,静态WSN系统的网络拓扑经常发生变化,WSN随时可能被划分成独立子网,这些独立子网之间无法互相通信,导致只有离基站最近的目标物体可以被监测到。
为了解决上述问题,本研究构建UAV-WSN农田移动无线传感网,在以UAV为移动应用采集节点的WSN网络中,选择了以簇为通信单元的拓扑结构设计,包含多个相对独立的无线传感网络簇,每个簇由物理位置上相邻的多个无线传感器节点组成,由簇首负责与移动节点通信非簇首节点负责采集数据,如图 1中的簇1或簇N所示。这种结构的设计提高了WSN的鲁棒性,WSN不会因为某簇或者簇中的某个结点失效而导致数据无法采集。
每个簇中的无线传感器节点都有2个状态,即睡眠状态和唤醒状态。平时无线传感器节点处于睡眠状态,当簇首节点接受到从UAV发出的无线信标信号时,簇首节点会通知所有节点进入唤醒状态。在唤醒状态中无线传感器节点将采集到的数据通过网络传输给簇首节点,与UAV进行必要的通信,当其成功地将所采集的信息数据发送给UAV或UAV并飞离可通信区域后,簇中的无线传感器节点将重新进入睡眠状态。这种睡眠-唤醒机制可以减少无线传感器节点的能量消耗,延长工作时间,从而提高系统的整体能量效率[15-18]。
1.2.2 UAV搭载的移动节点的设计移动采集节点是配备无线通信模块的UAV。在信息接入节点的控制下,UAV在目标信息区域执行相应的任务,通过与各个无线传感器节点簇进行通信,收集无线传感器节点采集到的环境信息。
1.2.3 数据中心的设计数据中心主要包括系统中的基站和服务器、存储设备,基站负责与UAV进行通信连接。一般来说,数据中心具有较强的数据处理能力和较高的能量储备,且具有较强的抗毁性。数据中心会通过3G或4G网络向UAV发送指令,控制其运动路线并执行特定的任务。
1.2.4 通信部分(网络结构)的设计对于无线传感器节点而言,由于其自身能量消耗的限制和处理能力的限制,在考虑无线传感器节点的网络通信结构时,要考虑物理层、MAC(Medium Access Control)层和网络层设计, 其中, 网络层主要考虑的是WSN系统的路由设计,而MAC层和物理层则主要进行数据传输。
1) MAC层通信设计:为了能够在良好的能量效率约束下提供更高的系统吞吐率,MAC层协议十分重要。因为MAC协议起着协调各个无线传感器节点以共用无线媒体资源的作用。MAC协议允许处于同一个网络内的无线传感器节点共享一个公用无线信道。MAC协议最主要的任务就是在保证较好的能量效率、较低的系统时延以及节点公平性的同时,避免网络中发生并发传输,并减少数据包的冲突率。系统采用了CSMA/CA(Carrier sense multiple access with collision avoidance)协议,利用ACK信号来避免冲突的发生。CSMA/CA协议工作过程中,首先在送出数据前,监听信道状态,在无人使用信道并维持一段时间后,才送出数据。由于每个设备采用的随机时间不同,这样可以减少冲突的机会。另外,在送出数据前,先送一段小小的请求传送报文给目标端,等待目标端回应报文后,才开始传送。利用握手程序,确保接下来传送资料时,不会被碰撞。由于握手程序的封包都很小,让传送的无效开销变小。CSMA/CA通过这种方式来提供无线的共享访问,这种显式的ACK机制在处理无线问题时非常有效。虽然增加了一定的开销,但是对于整个UAV-WSN的性能影响很小。
2) 网络层通信设计:在UAV-WSN的体系结构中,WSN内部节点之间以及WSN、UAV移动节点之间采用Zigbee协议进行通信。UAV移动节点与基站之间采用3G,UAV移动节点具有良好的存储转发功能,在执行飞行任务过程中,如果由于移动运营商提供的服务质量出现问题、或者由于飞行过程中带来的不稳定,导致数据无法及时传送到数据中心,移动节点会暂时存储数据,待3G通信恢复正常时,继续传送数据,从而大大提高了UAV-WSN系统的可靠性。
2 数据采集的试验设备与方法 2.1 试验设备及参数设备包括节点和移动基站(图 2)。试验中WSN传输节点采用Crossbow eN2120,具体参数见表 1;移动节点采用SBC6020模块,具体参数见表 2。

|
图 2 UVA-WSN的试验设备 Figure 2 UVA-WSN experimental setup |
|
|
表 1 WSN传输节点参数 Table 1 WSN transmission node parameters |

|
|
表 2 移动节点参数表 Table 2 Mobile node parameters |

试验在华南农业大学岑村教学实习基地进行,试验选择了3个地块,每个地块之间的相互距离超过100 m,以使得每个地块内部的无线传感器网络能够独立成簇,并且不会干扰和影响到其他地块内的节点工作。部署了静态WSN和UAV-WSN 2种网络环境,对3个地块中的农田数据进行采集,并在采集的过程中收集各传输节点的数据传输情况,对这2种环境下的数据传输质量进行统计和对比分析。
2.2.1 数据采集1) 静态WSN环境下数据采集:每个地块放置了2~3个无线传感器节点和1个固定基站,地块1放置节点1、2、3和基站1,地块2放置结点4、5和基站2,地块3放置节点6、7、8和基站3(图 3)。地块n中的传输节点先利用XMesh多跳自组网协议与地块n中具有相同Channel ID的基站完成组网,节点联通后开始通信,并通过网关发送指令,连接传感器的节点收到指令后按照设定的频率完成农田数据的定时采集和传输,并同时将农田数据和节点数据传输情况发回网关。

|
图 3 3个地块的静态WSN分簇试验 Figure 3 The static WSN clustering experiments in 3 plots |
2) UAV-WSN环境下数据采集:每个地块放置了2~3个无线传感器节点,地块1放置节点1、2、3,地块2放置结点4、5,地块3放置节点6、7、8(图 4)。基站通信距离为300 m,从组网到完成数据采集时间最长需60 s,为了准确地采集各地块的数据,根据试验环境及系统参数的相关设置,试验中将无人机的飞行速度设置为1 m·s-1,飞行高度设置为10 m,基站与地面节点之间的通信窗口最大可以达到598 s,这个时间足以完成数据采集。

|
图 4 3个地块UAV-WSN的分簇试验 Figure 4 The UAV-WSN clustering experiments in 3 plots |
通过地面站系统预先规划无人机航线可实现飞机自主飞行作业。此时,飞机携带基站在空中按照预先设定的轨迹飞行,飞行过程中在地块n的上方与地块n交互,并收集地块n中采集到的农田数据。
飞机到达指定地块上空前,各传输节点处于休眠状态,此时节点只开启部分监听功能。当携带移动节点的飞机到达指定地块上空时,具有相同Channel ID的基站与各传输节点先利用XMesh多跳自组网协议完成组网,节点联通后开始通信,并通过网关发送指令将各节点唤醒,接着传感器完成数据采集,传输节点完成数据的传输,网关接收完农田数据和数据传输情况后,飞机飞离该地块。
2.2.2 传输质量统计方法试验通过收集各传输节点的数据发送和接收情况,并结合相关的计算公式对各地块的网络进行链路消耗和丢包率统计。

|
(1) |
式中,Eplr为丢包率,Pr是基站从单个节点接收到的数据包数量,它是基站根据节点实际发送过来的数据包计算得到的;Ps是单个节点向基站发送的数据包总数量,它是基站根据该节点发送过来的数据包中标识包序号的字段值得来的。

|
(2) |
式中,Ec是链路评估值,Pnr是节点接收包的数量,Pnm是节点丢失包的数量。

|
(3) |
式中,α是指数加权移动平均数算法的因子,取值范围[0, 1],Er是节点接收评估值,取值范围[0, 255]。

|
(4) |
式中,Es是节点发送评估值,与邻居节点的Er一致,可根据对方发出的Router包,来获得自己的Es,LC是节点与邻居节点之间的链路消耗值。

|
(5) |
式中,NC是节点的邻居节点到达基站的链路消耗值,OC是节点到达基站的链路消耗值。
3 结果与分析根据公式(1),可以计算出每个地块不同节点与基站之间数据传输的丢包率。根据公式(2)~(5),可以计算出每个地块中不同节点与基站之间的链路消耗,结果见表 3。
|
|
表 3 每个地块中静态WSN和UAV-WSN的平均链路消耗和丢包率1) Table 3 Average link cost and packet lost rate of static WSN and UAV-WSN in each plot |
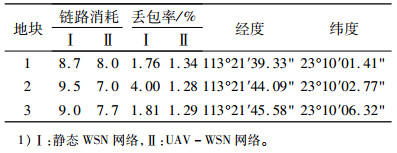
表 3的结果表明,利用静态WSN网络进行数据采集时,由于基站部署位置和高度相对固定,受地块周边自然环境影响导致链路消耗和丢包率较大。而利用UAV-WSN网络进行数据采集时,由于基站跟随无人机能够动态改变采集位置,并且空中比地面受到的干扰要少,可以有效地避免环境影响,降低链路消耗和丢包率。与静态WSN网络相比,利用UAV-WSN网络地块1的平均链路消耗降低了约10%,平均丢包率降低了约24%;地块2的平均链路消耗降低了约27%,平均丢包率降低了约68%;地块3的平均链路消耗率降低了约14%,平均丢包率降低了约29%。可见,利用UAV-WSN网络进行数据采集时的通信质量明显优于静态WSN网络。
4 结论本文提出的将UAV与WSN结合起来,应用到农田数据采集中,充分利用了空中的移动节点与地面的无线传感节点之间的良好通信,解决了大面积农田数据采集环境中无线传感器网络由于环境恶劣而带来的网络通信质量不良,网络被划分成独立子网相互无法通信的问题。
通过搭建试验环境,利用多旋翼无人飞行器携带无线移动通信节点,利用Crossbow无线传感器组网,开展了田间试验,试验结果表明:1)UAV-WSN结构的网络通信质量优于传统的WSN网络通信质量;2)UAV-WSN结构的农田信息采集扩展了传统WSN结构的农田信息采集范围;3)UAV-WSN结构中采用的唤醒-休眠方式减少了无线传感器节点的能耗,提高了整个系统的生命周期。虽然试验只是在3个地块的环境中得以实现,但是系统可以利用到更广阔的田间环境中去。在无人机进行施肥、喷药、授粉作业过程中,同步进行高效、稳定的农田信息采集,提高了无人机的飞行使用效率;在无人机单独进行信息采集作业时,根据实际需要来设定合适的采样频率,可以降低使用成本。今后将进一步结合农业航空应用中的风力、风速以及雾滴喷施效果进行研究,快速利用信息分析处理的结果为农业精准喷施提供良好的决策支持。
| [1] |
肖克辉, 罗锡文, 陈剑, 等. 无线水分传感器网络分路定点路由[J]. 农业工程学报, 2012, 28(19): 137-144. DOI:10.3969/j.issn.1002-6819.2012.19.018 (  0) 0) |
| [2] |
肖德琴, 古志春, 冯健昭, 等. 稻田水分监测无线传感器网络优化设计与试验[J]. 农业工程学报, 2011, 27(2): 174-179. ( 0) |
| [3] |
汤波. 无线传感器网络低功耗数据路由协议与传输技术研究[D]. 成都: 电子科技大学, 2010: 29-44.
( 0) |
| [4] |
邓翰林, 李磊, 黄河清, 等. 无线传感网簇头轮换能耗分析与改进策略[J]. 上海交通大学学报, 2011, 45(3): 317-320. DOI:10.3969/j.issn.1674-8115.2011.03.016 ( 0) |
| [5] |
BEKMEZCI I, SAHINGOZ O K, TEMEL S. Flying ad-hoc networks (FANETs): A survey[J]. Ad Hoc Networks, 2013, 11(3): 1254-1270. DOI:10.1016/j.adhoc.2012.12.004 ( 0) |
| [6] |
WANG J, GHOSH R K, DAS S K. A survey on sensor localization[J]. J Control Theo Appl, 2010, 8(1): 2-11. DOI:10.1007/s11768-010-9187-7 ( 0) |
| [7] |
WANG W, VIKRAM S, CHUA K C. Using mobile relays to prolong the lifetime of wireless sensor networks[C]//ACM. MobiCom ′05 proceedings of the 11th annual international conference on mobile computing and networking. New York: ACM, 2005: 270-283.
( 0) |
| [8] |
CHEN C, MA J M. Multi-radio enabled mobile wireless sensor network[C]//IEEE. AINA ′06 proceedings of the 20th International conference on advanced information networking and applications. Washington: IEEE, 2006: 291-295.
( 0) |
| [9] |
VENKITASUBRAMANIAM P, ADIREDDY S, TONG L. Sensitivity and coding of opportunistic ALOHA in sensor networks with mobile access[J]. J VLSI Sig Proc, 2005, 41(3): 329-344. DOI:10.1007/s11265-005-4156-y ( 0) |
| [10] |
SHARMA V, KUMAR R. A cooperative network framework for multi-UAV guided ground ad hoc networks[J]. J Intel Robot Syst, 2015, 77(3/4): 629-652. ( 0) |
| [11] |
JAWHAR I, MOHAMED N, AL-JAROODI J, et al. A framework for using unmanned aerial vehicles for data collection in linear wireless sensor networks[J]. J Intel Robot Syst, 2014, 74(1/2): 437-453. ( 0) |
| [12] |
VALENTE J, SANZ D, BARRIENTOS A, et al. An air-ground wireless sensor network for crop monitoring[J]. Sensors, 2011, 11(1): 6088-6108. ( 0) |
| [13] |
MARTINEZ-DE DIOS J R, FERD K L, DE SAN BERNABÉA, et al. Cooperation between UAS and wireless sensor networks for efficient data collection in large environments[J]. J Intel Robot Syst, 2013, 70(1/2/3/4): 491-508. ( 0) |
| [14] |
ERIC W, TIMOTHY X, BROWN T X. Networking issues for small unmanned aircraft systems[J]. J Intel Robot Syst, 2009, 54(1/2/3): 21-37. ( 0) |
| [15] |
TROUBLEYN E, MOERMAN I, DEMEESTER P. QoS challenges in wireless sensor networked robotics[J]. Wireless Pers Commun, 2013, 70(3): 1059-1075. DOI:10.1007/s11277-013-1103-2 ( 0) |
| [16] |
DANG P, BALLAL P, LEWIS F, et al. Real time relative and absolute dynamic localization of air-ground wireless sensor networks[J]. J Intel Robot Syst, 2008, 51(2): 235-257. DOI:10.1007/s10846-007-9188-z ( 0) |
| [17] |
SUJIT P B, HUDZIETZ B P, SARIPALLI S. Route planning for angle constrained terrain mapping using an unmanned aerial vehicle[J]. J Intel Robot Syst, 2013, 69(1/2/3/4): 273-283. ( 0) |
| [18] |
DONG M X, OTA K, LIN M, et al. UAV-assisted data gathering in wireless sensor networks[J]. J Supercomput, 2014, 70(3): 1142-1155. DOI:10.1007/s11227-014-1161-6 ( 0) |