 2016, Vol. 37
2016, Vol. 37



水稻钵苗有序抛秧机是工厂化穴盘育秧技术[1]与有序抛秧种植新模式[2-3]有机结合的产物。相比以毯状苗移栽为主的插秧机,水稻钵苗有序抛秧机栽植水稻具有不伤根、根系发达、返青快、低节位有效分蘖多等特点[4]。基于不同移栽方案设计的钵苗有序抛秧机种类繁多[5-6],但均围绕自动进给钵苗、钵苗有序脱离穴盘和钵苗有序抛栽3个主要问题。自动进给钵苗有带穴盘进给和脱离穴盘排序进给2种方式[7-8]。纯机械式抛秧机通过机构实现送秧[9-16],但送秧环节漏秧是导致这类抛秧机漏栽率增加的重要原因之一[17-19]。带有光电开关或机器视觉定位并结合步进电机或伺服电机驱动送秧的方式也被用于实现钵苗的自动输送,控制精度高,通过补偿可减少机械累计误差,目前主要用于蔬菜或者花卉等穴钵体积较大的穴盘输送进给[20-22],有关水稻穴盘的研究和应用鲜有报道。本研究在前期研究[23]的基础上,设计集钵苗行到位检测及输送进给于一体的皮带式自动送秧机构及控制系统,提出了以秧苗茎秆、穴盘钵体以及铁盘磁性凸起3种不同检测对象的钵苗行到位检测方案,概括出钵苗行到位的综合测量属性,并通过试验考证3种方案对钵苗行到位检测评价指标的影响。
1 皮带式自动送秧机构的结构和工作原理皮带式自动送秧机构(BASFM)主要由链轮、主动轴、从动轴、皮带、张紧板等组成(图 1)。BASFM工作时,检测钵苗行的传感器通过定位板安装在水平支架的单侧(或双侧),并能随定位板调整移动选择钵苗行停止的位置,以确保与其配合并完成拔抛秧移栽的两自由度机械手秧夹的夹持面与钵苗行到位平面相重合,达到机械手最佳的夹持拔秧状态。

|
图 1 皮带式自动送秧机构的结构组成 Figure 1 Mechanical compositions of a belt-type automatic seedling feeding mechanism 1:从动辊轴;2:皮带张紧调节板;3:传感器定位板;4:秧盘限位装置;5:水平铝型材支架;6:PVC传送皮带;7:链条;8:主动辊轴;9:大链轮;10:小链轮;11, 12:交流伺服电机及其安装板;13:竖直铝型材支架。 |
BASFM控制电路由51系列单片机(STC89C52)、到位传感器、电阻分压电路、交流伺服电机驱动模块(YZ-ACSD608)、开关电源(S-360-36)和免维护铅酸蓄电池(NP7-12)组成,其硬件结构如图 2所示。

|
图 2 皮带式自动送秧机构控制电路硬件结构框图 Figure 2 Hardware structure diagram of control circuit for a belt-type automatic seedling feeding mechanism |
控制电路运行时,到位传感器反馈的12 V开关电压信号在电阻分压电路作用下转换成5 V的TTL高低电平信号[24],单片机根据程序设计从接收的电平信号中提取秧苗到位信息,并发出驱动信号到交流伺服电机驱动器,交流伺服电机驱动器控制伺服电机带动皮带式自动送秧机构工作。试验过程中,BASFM根据不同方案输送不同的检测对象,控制电路提供端口并根据试验要求可以实时改变皮带输送速度。
2 钵苗行到位检测方案和试验设计 2.1 试验设备及材料皮带式自动送秧机构样机1台,配套单片机控制试验电路硬件1套。白色穴盘和红色穴盘育秧的穴盘苗各1盘,水稻品种为华航31号,由2SJB-500精密播种流水线完成水稻穴盘播种,经过30 d的温室育秧获得,苗高平均约14 cm,每穴平均2~3株秧苗,苗茎秆平均直径2 mm,用于秧苗茎秆行检测试验,其中,白色穴盘育出的秧苗如图 3所示;另备白色和红色空穴盘各2盘,用于塑料穴盘钵体行检测试验;与白色穴盘和红色穴盘相配套的铁盘各1个,用于磁性凸起检测试验。

|
图 3 白色穴盘育秧秧苗 Figure 3 Rice seedlings raised in white tray |
在工厂化穴盘水稻育秧中,选用穴孔矩形排列布置的机用穴盘育秧可以降低后续抛秧机械的设计难度[25]。本试验中选用2种育秧穴盘、3种检测方案。穴盘钵体行侧面结构如图 4所示,其规格如下:1)白色穴盘:长×宽=585 mm×290 mm,穴孔孔型为倒梯形圆台孔,孔开口直径上部22.0 mm、下部12.0 mm、穴高20.0 mm,穴盘为23行×12列,共276穴,行中心距为25.5 mm;2)红色穴盘:长×宽=590 mm×285 mm,穴孔孔型为倒四棱台孔,上边宽17.0 mm、下边宽10.0 mm、穴高15.0 mm,穴盘为29行×14列,共406穴,行中心距为20.0 mm。

|
图 4 2种不同规格穴盘钵体行截面结构 Figure 4 Sectional dimension of two different kinds of cell-trays |
方案1:检测秧苗茎秆。穴盘培育水稻秧苗至适龄抛秧期,虽然每穴生长的钵苗株数不同,但由于穴孔矩形排列,且穴孔边缘间有3.0~3.5 mm的间隔,通常绝大部分秧苗具有直立生长的特点,因此,沿着穴盘行方向观察,钵苗行与行的秧苗茎秆之间形成了清晰的分界线。根据以上特点,选择检测尺寸达到毫米级别的传感器,通过侧面直接检测秧苗茎秆来识别钵苗行的到位。选用红外线反射式接近开关作为到位传感器,型号为E3X-NA11,光纤探头直径为1 mm,试验标定的传感器有效检测的最大距离为8 mm,响应时间为400 μs。
方案2:检测塑料穴盘钵体。用于育秧的塑料穴盘是吹塑成型工艺制造的标准件,穴盘钵体行侧面投影是等腰梯形,钵体行间形成规则的空隙(图 4),而钵体行与钵苗行是一一对应的,因此, 可通过侧面检测塑料穴盘钵体行来识别钵苗行。选用红外线对射式光电开关作为到位传感器,型号为E3F-5L(发射器)和E3F-5DN1(接收器),透镜直径为12 mm,响应时间为1 ms。
方案3:检测铁盘磁性凸起。田间人工搬运穴盘苗时,将塑料穴盘放到一个铁盘中实现辅助搬运,通过在铁盘侧面焊接与塑料穴盘中的钵体行一一对应的磁性凸起,采用间接检测铁盘侧面的磁性凸起实现钵苗行到位检测。本研究设计了2种铁盘,其磁性凸起间距分别与上述2种穴盘的行中心距相等,凸起高度则根据电感式传感器的有效检测距离确定,铁盘侧面凸起实物见图 5。铁盘长×宽×高为610 mm×290 mm×22 mm,凸起形状为半球形,凸起间距分别为25.5和20.0 mm,半径分别为8和5 mm。选用电感式接近开关作为到位传感器,型号为LJ18A3-8-Z/BX和LJ12A3-4-Z/BX,分别用于检测白色穴盘的磁性凸起(半径8 mm)和红色穴盘的磁性凸起(半径5 mm)。2种传感器的探头直径分别为16和10 mm,试验标定传感器有效检测的最大距离分别为8和4 mm,响应时间均为5 ms。

|
图 5 铁盘侧面磁性凸起实物图 Figure 5 Photograph of magnetic bulges aside ferric tray |
本研究选用的传感器均属于同一类输出开关量电压信号的常开型传感器,当传感器前端有效距离内没有物体遮挡时,信号线输出高电平;反之,输出低电平。上述3种方案中,当检测对象(钵苗行茎秆、穴盘钵体和磁性凸起)遮住了传感器,即可认为钵苗行到位;而钵苗行未到位期间,传感器均处于无遮拦状态(钵苗行茎秆间空隙、穴盘钵体间空隙和磁性凸起间空隙)。所以,当不同检测对象经过传感器前,就会形成不同占空比的矩形电压信号,而钵苗行到位信号映射在电压信号上的一个重要特征是电压信号的下降沿,通过电压信号下降沿触发单片机中断,即可识别钵苗行到位信息[26]。
单片机控制电路实际应用中,外界电磁场或者电源噪声等干扰会经过传感器信号线窜入单片机引脚[27],这会影响单片机电路对钵苗行到位信号的判断。为了提高钵苗行到位信号识别的可靠性和稳定性,对单片机所接收到的下降沿信号进行了筛选,筛选方法参考文献[28-29]。
单片机在接收传感器电压信号的同时,按固定周期不断实时存储传感器信号线的高低电平。当下降沿触发中断时,则程序会提取当前传感器信号线的电平与前一周期存储的电平进行“或”逻辑的比较,如果前一周期存储电平是高电平“1”(传感器探头处于检测对象间隙),由于当前电平是低电平“0”(传感器探头受检测对象遮挡),则判断所触发中断下降沿是“真实”的钵苗行到位信号,可经过“或”逻辑进入执行中断内容,即停止输送秧苗;而如果前一周期存储电平是低电平“0”,由于当前电平也是低电平“0”,则判断所触发中断下降沿是窜入引脚瞬时噪声干扰造成的,是“虚假”的钵苗行到位信号,这些中断将无法通过“或”逻辑,同时程序将忽略它们返回执行主程序,即继续输送秧苗。
2.4 试验设计针对3种钵苗行到位检测方案,分别安排了试验加以验证。试验因素为输送电机转速和穴盘类型,输送电机转速根据秧苗进给效率的要求,设为30、40、50和60 r·min-1(对应皮带输送速度为26.7、35.6、44.5和53.4 mm· s-1)。
首先,调整好秧盘限位装置以及对应不同检测方案的传感器在定位板上的安装位置,以保证检测对象处于传感器的有效探测范围内:1)秧苗茎秆行检测,传感器光轴距离穴盘上表面高度15 mm(处于秧苗第1分蘖点下方,为茎秆部位,叶片干扰最少),光纤探头伸入穴盘内部,其端面与穴盘穴孔外边缘平齐;2)穴盘钵体行检测,传感器光轴与输送皮带上表面垂直距离为7 mm,发射器和接收器光轴重合;3)铁盘磁性凸起检测,传感器光轴与皮带上表面垂直距离10 mm。
其次,将传感器信号线接入控制电路,通过程序设计当检测到钵苗行到位信号时,停止输送秧苗2 s,之后重新继续输送,直到检测到下一行秧苗。以上调试完毕后,将试验对象(穴盘苗、空穴盘或铁盘)摆放到BASFM上进行试验。评价指标包括:1)重复检测:某一钵苗行在传感器正前方停留2次以上;2)遗漏检测:某一钵苗行在传感器正前方停留0次;3)成功检测:某一钵苗行在传感器正前方仅停留1次。重检率(Rr)、漏检率(Rm)和检测成功率(Rs)的计算公式如下:
|
(1) |
|
(2) |
|
(3) |
式中,Nf为单盘进给行数;Nr为重复检测行数;Nm为遗漏检测行数。
秧苗茎秆行检测试验:2种穴盘类型的穴盘苗在4个输送速度下分别重复输送进给5次,通过人工观察,记录每次试验的重复检测行数、遗漏检测行数和单盘进给行数,取5次重复的平均值作为试验结果进行评价。穴盘钵体行检测试验和铁盘磁性凸起检测试验方法相同。
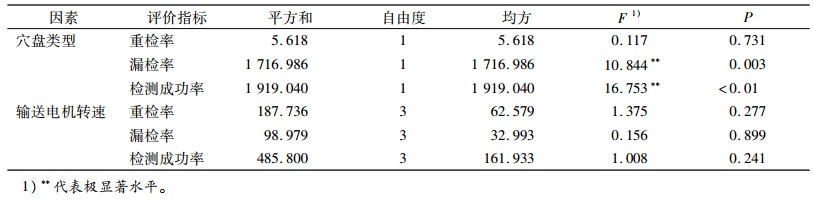
3 结果与分析 3.1 秧苗茎秆行检测试验结果图 6为2种穴盘类型育秧条件下,4个输送电机转速对应的3个评价指标。从图 6可以看出,随着输送电机转速的变化,白色穴盘钵苗行的重检率与红色穴盘的相差不大,但漏检率明显高于红色穴盘,平均高10个百分点,导致红色穴盘钵苗行的检测成功率均高于白色穴盘,且输送电机转速为50 r·min-1时,红色穴盘钵苗行的检测成功率达到最大值(约65%)。两因素方差分析结果(表 1)表明,3个评价指标中,穴盘类型对钵苗行的漏检率和检测成功率影响达极显著水平,对重检率的影响不显著;而输送电机转速对钵苗行的3个评价指标影响均不显著。

|
图 6 穴盘类型和输送电机转速对评价指标的影响 Figure 6 Effects of transport motor speeds and tray types on evaluation indexes |
|
|
表 1 秧苗茎秆行检测评价指标的两因素方差分析 Table 1 Two-way ANOVA of evaluation indexes based on direct-on-line detection of seedling stalk |
造成检测白色穴盘育出的秧苗漏检率高于红色穴盘的原因是白色穴盘穴孔尺寸比红色穴盘的大,同等播种密度条件下,白色穴盘秧苗茎秆生长比红色穴盘稀疏,导致秧苗茎秆与光纤探头端面的相对距离远近不一,出现某些秧苗茎秆超出传感器的检测范围,致使无法检测到秧苗,从而使漏检率增加。
上述结果说明,BASFM检测对象为秧苗茎秆钵苗行时,选用红色穴盘类型育秧更有利于提高钵苗行检测成功率,且在30~60 r·min-1范围内调节输送电机转速不会对钵苗行到位检测效果造成显著影响。
3.2 穴盘钵体行检测结果穴盘钵体行检测发现,40次试验中,红色穴盘的重检行和漏检行均为0,检测成功率为100%;当输送电机转速为50 r·min-1时,白色穴盘的单次试验中出现了2行钵苗行重复检测现象,致使其平均检测成功率降为99.56%(检测总行数为460行),整个试验的平均检测成功率为99.78%。试验中用于检测的空穴盘钵体完整无损、结构无变形,出现2行钵苗行重复检测的原因是控制电路传感器信号受到干扰,无法被软件程序过滤导致的意外结果。以塑料穴盘钵体为检测对象时,钵苗行到位检测效果不受输送电机转速以及育秧穴盘类型的影响,完全能够满足钵苗有序自动抛秧机对钵苗行输送进给的性能要求。
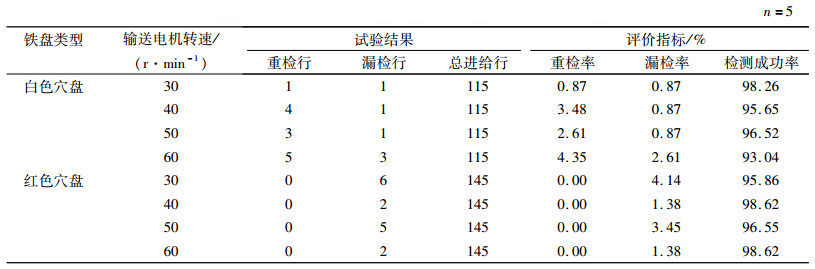
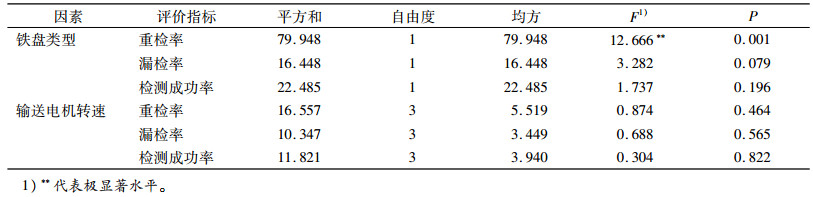
3.3 铁盘磁性凸起检测结果从表 2可知,在铁盘磁性凸起检测中,白色穴盘的重检率(平均为2.83%)比红色穴盘的高;漏检率比红色穴盘(平均为2.59%)的低;两者的检测成功率相接近。白色穴盘重检率高的原因是其凸起的半径大于红色穴盘,导致适用白色穴盘磁性凸起钵苗行到位信号的低电平占空比比红色穴盘的大,在同等干扰环境以及软件滤波措施下,白色穴盘电压信号低电平被外部干扰瞬间拉高的概率增大,一旦外部干扰信号频率大于软件滤波采样频率,就会形成“虚假”的钵苗行到位信号,最终导致白色穴盘的重检率比红色穴盘的高。整个试验的平均重检率和漏检率均低于2%,平均检测成功率为96.64%,基本满足了钵苗有序自动抛秧机对钵苗行输送进给的性能要求。方差分析结果(表 3)表明,铁盘类型对钵苗行重检率的影响极显著(P < 0.01),对漏检率和检测成功率的影响不显著;而输送电机转速对检测铁盘的3个评价指标影响均不显著,说明在30~60 r·min-1范围内调节输送电机转速对钵苗行到位检测效果影响不大。
|
|
表 2 铁盘磁性凸起检测试验结果 Table 2 Results of detecting magnetic bulges aside ferric tray |
|
|
表 3 铁盘磁性凸起检测评价指标的两因素方差分析结果 Table 3 Two-way ANOVA of evaluate indexes based on detection of magnetic bulge of ferric tray |
3种钵苗行到位检测方案中,以塑料穴盘钵体为检测对象的方案,皮带式自动送秧机构(BASFM)平均检测成功率最高(99.78%),铁盘磁性凸起的次之(96.64%),秧苗茎秆的最差。以塑料穴盘钵体和铁盘磁性凸起为检测对象的2种钵苗行到位检测方案,穴盘类型均不会对钵苗行到位检测的效果造成显著影响;但以秧苗茎秆为检测对象的钵苗行到位检测方案中,穴盘类型对钵苗行到位检测的效果影响显著,采用红色穴盘育秧可以提高钵苗行的检测成功率。输送电机转速在30~60 r·min-1范围内调节,对钵苗行到位检测的效果影响不显著。
试验结果表明,所提出的检测钵苗行到位的综合测量属性及其控制电路实现方法,能够较好地检测以塑料穴盘钵体和铁盘磁性凸起为检测对象的钵苗行到位情况,达到了设计要求,但不适合以秧苗茎秆为检测对象的钵苗行到位情况。本研究所设计的BASFM及其控制系统可以满足水稻钵苗有序抛秧机对钵苗行自动输送进给的要求。
| [1] |
周海波, 马旭, 姚亚利. 水稻秧盘育秧播种技术与装备的研究现状及发展趋势[J]. 农业工程学报, 2008, 24(4): 301-306. DOI:10.3321/j.issn:1002-6819.2008.04.060 (  0) 0) |
| [2] |
闫凤宇, 于凤阁. 水稻抛秧应用现状及技术要点[J]. 现代农业科技, 2011(3): 99. DOI:10.3969/j.issn.1007-5739.2011.03.054 ( 0) |
| [3] |
马瑞峻, 区颖刚, 王玉兴, 等. 穴盘水稻秧苗机械抛栽的农艺要求[J]. 华中农业大学学报, 2003, 22(1): 55-59. DOI:10.3321/j.issn:1000-2421.2003.01.013 ( 0) |
| [4] |
张冬梅, 汪春. 水稻钵育机械化栽培技术研究现状及发展趋势[J]. 长春理工大学学报(高教版), 2009, 4(7): 175-176. ( 0) |
| [5] |
夏俊芳, 王树才, 许绮川. 水稻抛秧机械的现状与发展趋势[J]. 农业机械, 2001(11): 35-36. ( 0) |
| [6] |
李建桥, 张国凤, 陈建能, 等. 钵苗有序移栽机构的研究进展及应用展望[J]. 农机化研究, 2008(2): 1-5. DOI:10.3969/j.issn.1003-188X.2008.02.001 ( 0) |
| [7] |
杨坚, 阳潮声, 陈兆耀, 等. 2ZB-8电磁振动式小型水稻钵苗移栽机的研究[J]. 农业工程学报, 2002, 18(6): 84-87. DOI:10.3321/j.issn:1002-6819.2002.06.022 ( 0) |
| [8] |
陈风. 钵苗移栽机输送、分苗系统的研究[D]. 石河子: 石河子大学, 2005.
( 0) |
| [9] |
陈恒高, 宋来田, 田金和, 等. 水稻机制钵苗抛秧机的研究[J]. 农业机械学报, 1996, 27(3): 47-51. ( 0) |
| [10] |
陈恒高, 田金和, 宋来田, 等. 机械手式水稻抛秧机的研究[J]. 农业机械学报, 1998, 29(3): 48-52. ( 0) |
| [11] |
王瑞丽, 李宝筏. 水稻钵苗有序移栽试验装置的研究[J]. 农机化研究, 2007(9): 116-118. DOI:10.3969/j.issn.1003-188X.2007.09.036 ( 0) |
| [12] |
原新斌, 张国凤, 陈建能, 等. 顶出式水稻钵苗有序移栽机的研究[J]. 浙江理工大学学报, 2011, 28(5): 749-752. DOI:10.3969/j.issn.1673-3851.2011.05.020 ( 0) |
| [13] |
韩长杰, 杨宛章, 张学军, 等. 穴盘苗移栽机自动取喂系统的设计与试验[J]. 农业工程学报, 2013, 29(8): 51-61. ( 0) |
| [14] |
包春江, 李宝筏, 包文育, 等. 水稻钵苗空气整根气吸式有序移栽机的研究[J]. 农业工程学报, 2003, 19(6): 130-134. DOI:10.3321/j.issn:1002-6819.2003.06.031 ( 0) |
| [15] |
高英武, 任述光, 汤兴初, 等. 步进式水稻钵苗摆植机送秧机构的研究[J]. 农业机械学报, 2003, 34(2): 37-39. DOI:10.3969/j.issn.1000-1298.2003.02.012 ( 0) |
| [16] |
杜立恒, 俞高红, 张国凤, 等. 高速插秧机钵体毯状苗纵向送秧装置的设计与试验[J]. 农业工程学报, 2014, 30(14): 17-25. DOI:10.3969/j.issn.1002-6819.2014.14.003 ( 0) |
| [17] |
成永芳. 日本RX-6型水稻钵苗移栽机引进试验简报[J]. 粮油加工与食品机械, 1999(3): 28-32. ( 0) |
| [18] |
KUMAR G V P, RAHEMAN H. Automatic feeding mechanism of a vegetable transplanter[J]. IJABE, 2012, 5(2): 20-27. ( 0) |
| [19] |
SATPATHY S K, GARG I K. Effect of selected parameters on the performance of a semi-automatic vegetable transplanter[J]. AMA-Agr Mech Asia, Af, 2008, 39(2): 47-51. ( 0) |
| [20] |
吴俭敏, 颜华, 金鑫, 等. 移栽机送盘装置与定位控制系统研究[J]. 农业机械学报, 2013, 44(S1): 14-18. ( 0) |
| [21] |
田素博, 王荣华, 邱立春. 温室穴盘苗自动移栽输送系统设计[J]. 沈阳农业大学学报, 2009, 40(5): 620-622. DOI:10.3969/j.issn.1000-1700.2009.05.023 ( 0) |
| [22] |
RYU K H, KIM G, HAN J S. AE:Automation and emerging technologies: Development of a robotic transplanter for bedding plants[J]. J Agr Eng Res, 2001, 78(2): 141-146. ( 0) |
| [23] |
马瑞峻, 区颖刚, 赵祚喜, 等. 水稻钵苗机械手取秧有序移栽机的改进[J]. 农业工程学报, 2003, 19(1): 113-116. DOI:10.3321/j.issn:1002-6819.2003.01.029 ( 0) |
| [24] |
汤平波. 单片机系统的电平转换技术[J]. 计算技术与自动化, 1996, 15(4): 71-74. ( 0) |
| [25] |
郞春, 郎小飞, 郎明飞. 水稻钵体育苗摆栽机专用育秧盘: CN200920099436. 5[P]. 2010-03-03.
( 0) |
| [26] |
张小鸣. 单片机系统设计与开发[M]. 北京: 清华大学出版社, 2014.
( 0) |
| [27] |
王幸之, 王雷, 钟爱琴, 等. 单片机应用系统电磁干扰与抗干扰技术[M]. 北京: 北京航空航天大学出版社, 2006.
( 0) |
| [28] |
顾永红. 综述单片机应用系统的抗干扰设计[J]. 计算机自动测量与控制, 2000, 8(1): 51-53. ( 0) |
| [29] |
秦臻, 田宏伟. 单片机应用系统电磁干扰技术研究[J]. 机械管理开发, 2011(5): 67-68. DOI:10.3969/j.issn.1003-773X.2011.05.035 ( 0) |