 2016, Vol. 37
2016, Vol. 37


2. 国际农业航空施药技术联合实验室/农业航空应用技术国际联合实验室/广东省农业航空应用工程技术研究中心,广东 广州 510642;
3. 华南农业大学 工程学院,广东 广州 510642
2. International Laboratory of Agricultural Aviation Pesticide Spraying Technology/International Laboratory of Agriculture Aviation Applied Technology/Engineering Research Center for Agricultural Aviation Application of Guangdong Province, Guangzhou 510642, China;
3. College of Engineering, South China Agricultural University, Guangzhou 510642, China
小型无人机(Unmanned aerial vehicle, UAV)具有体积小、质量轻、稳定、可靠、低空低速飞行的特点,在农业化肥农药的喷施、遥感监测等领域有着广泛的应用。避障功能是实现无人机安全飞行的重要手段,是无人机目前迫切需要解决的一个难题。超声波传感器具有体积小、质量轻、测量精度高等优点,是用于实现无人机避障功能的常用传感器,然而超声波传感器在实际应用中容易受到多种因素的干扰,其中,小型无人机振动特性对超声波传感器的影响至关重要。当前无人机振动的研究主要集中在振动信号的采集和分析领域,周浩天等[1]设计了基于音圈电机和压电陶瓷快速倾斜镜的双级振动模拟系统, 研究结果表明, 系统模拟的美国Altair无人机振动功率谱密度函数与其输入的无人机功率谱密度函数的相关系数为0.93, 真实地再现了机载平台的振动特性。史忠震等[2]运用Ansys有限元分析软件对永磁直流无刷电动机进行了模态分析, 得到了该电机振动系统的前8阶固有频率和相应的振型, 明确了电机的振动特性,郑勇[3]采用改进算法采集振动信号,提高了采集信号的准确性和实时性。关于无人机振动特性对超声波测距传感器影响的研究鲜见报道。本文通过测量小型四旋翼无人机试验平台的振动状况以及振动对超声波测距传感器的误差,研究了四旋翼无人机的振动特性,以及振动情况对于超声波测距传感器的影响效果,以期为超声波测距传感器在农业无人机上的应用提供理论依据。
1 试验设备与方法 1.1 试验设备 1.1.1 无人机试验平台构建小型四旋翼无人机的试验平台主要由电子调速器、飞行控制器、无线数传电台、无线遥控、碳纤机架等组成(图 1)。

|
图 1 无人机试验平台组成图 Figure 1 Architecture of unmanned aerial vehicle experimental platform |
1) 电子调速器Xrotor 40A:电子调速器能够接收飞行控制器的控制信号,控制动力电机的运行。本研究采用的Xrotor 40A电子调速器,可以提供持续电流40 A,瞬间电流能够达到60 A(10 s)。油门信号线采用双绞线,有效降低信号在铜线之间传输所产生的串扰[4],最高支持621 Hz的油门信号,兼容多种飞控,使用超低内阻的MOSFET专用驱动芯片,具有较强的耐流能力。
2) 无线数传3DR Radio:无人机通过无线数传与地面站保持通信。本研究采用的3DR Radio无线数传具有体积小、质量轻的特点,采用了FT232RQ工业级USB转TTL芯片,支持安卓系统的OTG连接。根据工作频段可分为433和915 MHz版本,支持Pixhawk、APM等开源飞控,接收灵敏度为-118 dBm。采用了MAVLink框架协议和跳频扩展技术,具有全双工通信2路自适应TDM,可以矫正不高于25%的数据位错误。
3) 无线遥控设备WFT 07:无线遥控设备可以远距离无线控制无人机执行飞行任务。本研究采用的无线遥控设备WFT 07的通信频段为2.4 GHz,采用总线数据传输,操控的敏捷度较强,低电压设计,支持多种电池接入,拥有高端扩频和跳频技术,具有较强的抗干扰能力[5]。
4) Pixhawk飞行控制器:飞行控制器采集惯性测量单元[6]的姿态信息、GPS的位置信息、电源管理模块的电池容量信息,根据接收机和无线数据传输模块接收到的信息,控制电子调速器的调整动力电机转速,使之产生相应的动作。
1.1.2 振动传感器振动传感器可分为压电式、电感式、电容式等,由于无人机的振动属于高频振动,压电振动传感器对于高频振动比较敏感,本研究选用模拟压电陶瓷震动传感器RB-02S082,灵敏度(2.00±0.02) mV·V-1,工作温度的范围为-10~70 ℃,利用压电陶瓷给电信号产生振动的逆向换过程,当压电陶瓷片振动[7]时就会产生电信号,根据电信号的强度可以判断振动的幅度。将其受力部分黏合在需要检测振动的部位,根据电压的大小反应测定振动部位的振动情况。
1.1.3 超声波测距传感器超声波测距传感器,采用超声波回波测距原理[8],运用精确的时差测量技术,检测传感器与目标物之间的距离。本文选用型号为HY-SFR05的超声波测距传感器模块,灵敏度可以达到0.003 m,工作电压为直流5 V,感应波束角不大于15°,探测距离范围0.02~4.50 m,通过单片机控制超声波传感器进行测距并采集数据。
1.2 试验方案设计无人机平台在运行过程中,其振动情况在无人机机体上存在一定的分布规律,并且包含了超声波传感器工作区域,同时超声波属于沿介质传播,无人机上的动力电机在运行时能够产生高频的振动,并沿着无人机的机体和空气传播,进而影响超声波传感器对于自身所发射超声波的接收,这对机载超声波传感器的测量精度存在一定的干扰作用。本文主要研究无人机机体振动的空间和频域的分布[9],以及对超声波测距传感器误差的影响。研究无人机本身的振动对于超声波传感器测距误差的影响,对提高超声波测距传感器的精准度、改善无人机作业稳定性具有积极意义,本文针对小型无人机平台的振动对于超声波测距的影响进行相关性试验。试验方案如下:
1) 将震动传感器黏贴在无人机的关键部位,通过示波器来检测传感器两端的电压,采集无人机处于不同油门开度的振动数据,得到振动数据的频谱分析和功率谱估计。分别采用傅里叶变换[10]和Welch法[11]从幅频特性谱和功率谱的角度分析无人机的振动情况,为无人机机载超声波传感器的选型提供参考,提高无人机自身运行的稳定性,减弱无人机机体振动对超声波传感器的影响效果。
2) 根据无人机振动强度的空间分布,检测振动最强部位对于超声波测距传感器在水平和垂直方向误差的影响,评判振动对于超声波测距传感器在2个方向测距误差的影响效果。
2 结果与分析 2.1 不同油门档位下无人机的振动性能将振动传感器黏结在无人机如图 2所示的部位,通过调整油门大小来进行测试,选用的6个油门分别为24%、32%、40%、48%、64%、72%,每次油门控制为2 min,共进行25组试验,每组重复5次。

|
图 2 25个振动测试点的分布 Figure 2 Distribution of 25 vibration test points |
第6档油门的振动数据采用FFT进行傅里叶变换,功率谱估计采用Welch法,滑动窗口为128点,得到的结果见图 3。图 3a中的功率谱曲线表明,振动的功率分布主要分布在0~10、48~51和98~100 kHz这3个低频区域。无人机的机体振动频域的分布可以作为无人机工作状况的评判标准,由图 3b的曲线可以观察到,振动功率集中分布在0 dBm附近,在23 kHz附近出现了最低点强度。

|
图 3 第6档油门平台振动的功率谱(a)和幅频特性(b) Figure 3 Power spectrum (a) and amplitude-frequency characteristic (b) of vibration in the small-size UAV with the sixth throttle |
由于整机一些点之间的距离差距不大,振动情况差别不明显,进行以9~12、17~20为中心点,与相邻的测试点进行数据平均[12],综合了6个油门档位和整体飞机测试点的振动数据,将6个油门档位的整体飞机测试点的振动数据进行平均,然后进行功率谱估计,得到图 4。图 4a是经处理后13个点的功率谱具体分布情况,图 4b则是所有振动测试点的功率谱平均。由图 4可以看出,功率谱主要分布在3个区域,即0~10、48~51和98~100 kHz区域。

|
图 4 6档油门平台整体的振动功率谱(a)与平均振动功率分布(b) Figure 4 Overall power spectrums (a) and average power spectrum characteristic (b) of vibration in the small-size UAV with six throttles |
对各个采集点的数据进行平均处理,得到6档油门平台整体的振动幅频特性图(图 5)。由图 5可见,振动幅度主要分布在低频区域;随着频率的增加,振动幅度整体上呈现下降的趋势;低频区域幅频特性中, 在8~9 kHz区域出现了局部尖峰[13],说明在整机机械振动特性分布的情况下存在其他振动,使得此区域振动强度大于附近区域。

|
图 5 6档油门平台整体的振动幅频特性 Figure 5 Overall amplitude-frequency characteristic of vibration in the small-size UAV with six throttles |
从上述振动情况的频域分布可以看出,振动在低频区域(0~1.5 kHz)的强度比较大,根据振动的频域分布,可以通过调整无人机载荷工作的敏感区域,避开振动强度大的区域。对于机载传感器工作频率在0~100 kHz附近的设备,需要将工作频率调整至这3个区域之外,以减少振动的影响。对于无人机振动频域分布发生改变的情况,可以结合输入控制对其工作状况进行评价。
按照图 2所示的位置,以采集数据的峰值表示振动强度,第6档油门的振动分布情况如图 6所示。由图 6可以观察到,在沿轴传播的过程中存在着明显的振动加强和消弱情况,这与李伟等[14]的结果相似。在空间位置上,这些点附近同时出现振动加强和振动减弱的情况,并且在图 2所示的3号位置和4号位置出现了振动最大的分布点,与图 2所示的1号位位置有明显的区别。

|
图 6 第6档油门情况下整体振动分布 Figure 6 Overall distribution of vibration strength in the small-size UAV with the sixth throttle |
在采集点得到的数据基础上进行线性插值,得到不同油门情况下无人机振动强度的分布等高图(图 7)。沿着Y轴观察可以发现,随着轴距的增加,振动强度的分布出现明显的分层,在轴距220~250、160~180和50~100 mm的区域出现振动加强的情况,在轴距190~220、110~150和25~75 mm的区域出现振动消弱的情况,表明随着轴距的增加,振动的传播在机臂轴上产生了叠加效应[15],出现加强和减弱的交替情况。图 7中还观察到3个振动比较强的分布区域:第1个为轴距为175 mm左右、油门在4.0~4.5档位的区域;第2个为轴距为175 mm左右、油门在5.5~6.0档位的区域;第3个为轴距250 mm左右,油门在5.5~6.0档位的区域。

|
图 7 不同油门档位的无人机振动强度分布等高线 Figure 7 Distribution and contour of small-size UAV vibration strength with different throttles |
根据无人机振动的空间分布结果,可对超声波测距传感器或其他传感器的安装进行规划,在无人机的中心位置(即轴距为0 mm的位置)安装传感器,减少无人机振动的影响。如果是多个分布型则需要在机臂轴上安装传感器,可以根据振动分层[16]的情况,选择振动消弱的区域进行安装。
2.2 平台对于超声波测距传感器的影响根据试验的结果,无人机振动最强的空间位置在1~4号的位置,按照图 2分布中在1~4号的位置进行测距试验,无人机载桨运行时处于半空中,其中水平和垂直检测的距离均为3.00 m,选用6个油门,分别为16%、32%、40%、48%、64%和72%,观察不同油门情况下超声波测距传感器的探测距离。水平和垂直探测时,每个档位做5次试验,取平均值记录测量误差,得到表 1。
|
|
表 1 载桨飞行对于超声波传感器的测距误差 Table 1 Distance measurement error of ultrasonic transducer in the flight with propellers |
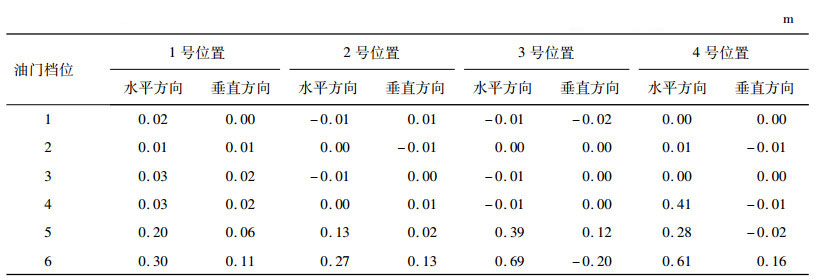
测试结果(表 1)表明,水平方向上的最大误差为0.69 m,误差平均值为0.15 m;不同油门情况下,无人机的运行对超声波的水平测距存在明显影响,低档油门情况下超声波测距的影响不显著[17],随着油门的上升,超声波测距的误差也增加;高档油门情况下的超声波测距是不可靠的,且3号和4号位置所产生的误差都大于1号和2号的位置,这可能是因为3号和4号电机振动强度小于1号和2号位置,所产生的向下气流会比1号和2号位置的气流更加稳定,更能够持续影响超声波测距传感器的水平测距误差[18]。在垂直方向上的最大误差为0.20 m,误差平均值为0.04 m。不同油门情况下无人机的运行对于超声波的垂直测距误差小于水平方向的。
3 结论无人机运行过程中,随着振动频率的增加无人机的振动幅度会降低,工作振动频率在0~100 kHz的机载传感器,调整传感器的振动频率可以减少无人机振动对传感器的影响。
振动的传播随着离无人机中心距离的增加,沿轴产生了叠加效应,并出现加强和减弱的交替情况。从油门控制和空间分布的角度看,振动最强的情况分布在离无人机中心距离250 mm的附近、油门在5.5~6.0档位的区域,说明随着离无人机中心距离和油门的增大,振动强度增大,这与Chen等[19]报道的结果相似。
无人机平台在有桨飞行过程中对于超声波的水平测距影响比较大,尤其在高档油门情况下更为明显,最大误差可以达到0.69 m,而对于垂直于地面方向的测距影响最大误差为0.20 m。相同油门情况下,无人机的运行对于超声波的垂直测距误差均小于水平测距误差。
今后将尝试采用更精确的传感器[20]采集四旋翼无人机的振动情况,并对振动数据进行深入的分析,进一步探讨无人机振动对超声波传感器的影响及探测方向的误差。
| [1] |
周浩天, 艾勇, 陈晶, 等. 机载光通信平台振动模拟系统的设计与实验[J]. 光电子·激光, 2014(7): 1315-1320. (  0) 0) |
| [2] |
史忠震, 杨立, 许贞俊, 等. 基于ANSYS的直流无刷电机模态分析[J]. 制造业自动化, 2013(17): 119-121. ( 0) |
| [3] |
郑勇. 无人机飞行异常振动信号采集方法研究[J]. 科技通报, 2014(7): 184-187. ( 0) |
| [4] |
相龙洋, 左曙光, 何吕昌, 等. 直流无刷电机定子总成振动特性分析[J]. 华北电力大学学报(自然科学版), 2011, 38(6): 23-28. ( 0) |
| [5] |
段静波, 江涛, 马航. 典型损伤对复合材料机翼振动特性的影响[J]. 复合材料学报, 2015(2): 565-570. ( 0) |
| [6] |
朱京海, 徐光, 刘家斌. 无人机遥感系统在环境保护领域中的应用研究[J]. 环境保护与循环经济, 2011(9): 45-48. ( 0) |
| [7] |
刘刚, 张卫, 陈强. 基于ANSYS的航空电机转子振动分析[J]. 微特电机, 2014(4): 47-48. ( 0) |
| [8] |
苏纯钢, 朱泉. 振动分析技术在大型电机运行监测中的作用[C]//中国机械工程学会设备维修分会. 第十届全国设备监测与诊断技术学术会议论文集. 北京: 中国机械工程学会设备维修分会, 2000: 5.
( 0) |
| [9] |
刘博, 常佶. 用于小型无人机的超声波低空测高系统实验研究[J]. 宇航计测技术, 2010(3): 74-78. ( 0) |
| [10] |
杨晓明, 晋玉剑, 李永红. 经典功率谱估计Welch法的MATLAB仿真分析[J]. 电子测试, 2011(7): 101-104. ( 0) |
| [11] |
王福彤, 陶夏新, 郑鑫, 等. 交通环境振动观测中本底振动去除的功率谱修正法[J]. 振动与冲击, 2011(4): 124-126. ( 0) |
| [12] |
杨尚云, 曾体贤, 黄超. 基于超声波测距的无人机自动保护气囊系统[J]. 西华师范大学学报(自然科学版), 2013(4): 409-412. ( 0) |
| [13] |
黄丰, 黎顺泰, 翁南华. 微轻型无人机的避障飞行技术研究[J]. 中国电业(技术版), 2015(11): 229-233. DOI:10.3969/j.issn.1002-1140.2015.11.074 ( 0) |
| [14] |
李伟, 刘佳, 陈祖金. 无人机载光电平台减振升降机构设计[J]. 科学技术与工程, 2009(19): 5921-5924. DOI:10.3969/j.issn.1671-1815.2009.19.075 ( 0) |
| [15] |
张涛. 振动台功率谱复现控制算法的研究[D]. 哈尔滨: 哈尔滨工业大学, 2008.
( 0) |
| [16] |
LI X M, WAN J F, et al. A review of industrial wireless networks in the context of Industry 4.0[J]. Wirel Netw, 2015, 26: 1-19. ( 0) |
| [17] |
LI H, ZHANG H, ZHANG B, et al. A method suitable for vicarious calibration of a UAV hyperspectral remote sensor[J]. IEEE J-STARS, 2015, 8(6): 3209-3223. ( 0) |
| [18] |
TAURO F, PAGANO C, PHAMDUY P, et al. Large-scale particle image velocimetry from an unmanned aerial vehicle[J]. IEEE-Asme T Mech, 2015, 20(6): 3269-3275. DOI:10.1109/TMECH.2015.2408112 ( 0) |
| [19] |
CHEN F, DENG P, WAN J, et al. Data mining for the internet of things: Literature review and challenges[J]. Int J Distrib Sens N, 2015(9): 1-14. ( 0) |
| [20] |
ZHANG D, WAN J, HE Z, et al. Identifying region-wide functions using urban taxicab trajectories[J]. Acm TECS, 2016, 15(2): 1-19. ( 0) |